We will go through some steps in detail below; In short we are going to make a mission on the Herelink and save it, then we are going to load that mission made on the Herelink into QGroundControl.
Step 1.
Make sure the QGroundControl is the latest version or atleast 4.3.0
If not installed: Download via the link below:
LINK TO DOWNLOAD QGROUNDCONTROL
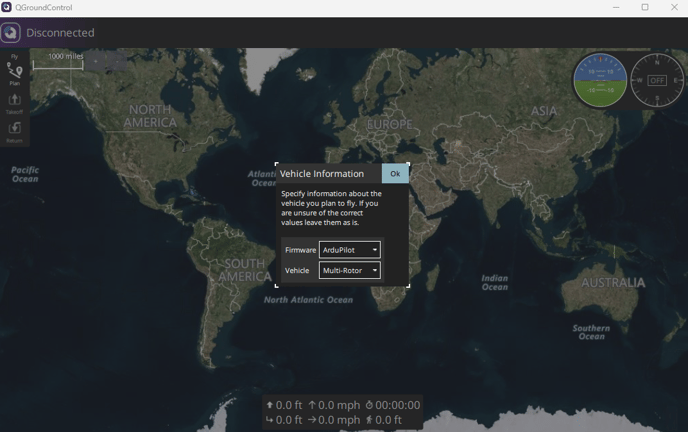
When the QGroundControl First boots make sure to fill out the second window with:
Firmware: Ardupilot
Vehicle Multi-Rotor
Step 2:
Delete the missions made from that QGroundControl on your computer and the herelink
Step 3:
Make a generic small mission on the Herelink and save it.
- Open QGC on the controller
- Click the Plan tab
- Make a basic survey mission
- File Save and call the mission "type_fix"
Step 4:
Pull the mission from the Herelink onto the computer
- Plug the Herelink into your computer
- Swipe down and select the Charging options at the bottom of the top screen
- within the window select File Transfer
- Within your computer's file explorer go to:
"This PC" > Optimus> Internal Storage > QGroundControl > Missions
- Drag and Drop the type_fix.plan onto your Desktop
Step 5:
Open the Herelink Made mission on QGroundControl
- Open QGroundControl
- Go to the plan tab
- Click Open
- Inside the browser navigate to the desktop and select type_fix.plan
- Once loaded save the mission as type_test.plan
Step 6:
To test Plan an example mission on QGroundControl.
- Reboot QGroundControl
- Open the Plan tab
- plan a simple mission
- save and transfer to the Herelink
- open the mission on the Herelink to confirm the issue is resolved
*If the mission is still showing firmware type incorrect, then uninstall QGroundControl and follow step 1 to ensure the correct firmware type is set.